Available Optimizers: How to Find Maximum A Posteriori?
Source:vignettes/Optimizers.Rmd
Optimizers.Rmd
?find_MAP()What are we optimizing?
The goal of the find_MAP() is to find the permutation
that maximizes the a posteriori probability (MAP - Maximum A
Posteriori). Such a permutation represents the most plausible symmetry
given the data.
This a posteriori probability function is described in-depth in the
Bayesian model selection section of the
vignette("Theory", package="gips"), also available as a pkgdown
page. gips can calculate the logarithm of it by the
log_posteriori_of_gips() function. In the following
paragraphs, we will refer to this a posteriori probability function as
.
We have
.
Available optimizers
The space of permutations is enormous - for the permutation of size
,
the space of all permutations is of size
(
factorial). Even for
,
this space is practically impossible to browse. This is why
find_MAP() implements multiple (3) optimizers to choose
from:
-
"brute_force","BF","full"| recommend for . -
"Metropolis_Hastings","MH"| recommend for . -
"hill_climbing","HC"
Note on computation time
The max_iter parameter works differently in
Metropolis-Hastings and hill climbing.
For Metropolis-Hastings, it computes the a posteriori probability for
max_iter permutations, whereas for hill climbing, it
computes
max_iter of them.
In the case of the Brute Force optimizer, it computes all values. The number of all different follows OEIS sequence A051625.
Brute Force
It searches through the whole space at once.
This is the only optimizer that will certainly find the true MAP estimator.
Brute Force is only recommended for small spaces (). It can also browse bigger spaces, but the required time is probably too long. We tested how much time it takes to browse with Brute Force (Apple M2), and we show the time in the table below:
| p=2 | p=3 | p=4 | p=5 | p=6 | p=7 | p=8 | p=9 | p=10 |
|---|---|---|---|---|---|---|---|---|
| 0.0035 sec | 0.008 sec | 0.015 sec | 0.056 sec | 0.25 sec | 1.31 sec | 10.0 sec | 57 sec | 16.9 min |
Example
Let’s say we have the data Z from the unknown
process:
dim(Z)
#> [1] 13 6
number_of_observations <- nrow(Z) # 13
perm_size <- ncol(Z) # 6
S <- cov(Z) # Assume we have to estimate the mean
g <- gips(S, number_of_observations)
g_map <- find_MAP(g, optimizer = "brute_force")
#> ================================================================================
g_map
#> The permutation (1,2,3,4,5,6):
#> - was found after 362 posteriori calculations;
#> - is 28979.967 times more likely than the () permutation.Brute Force needed 362 calculations, as predicted in OEIS sequence A051625 for .
Metropolis-Hastings
This optimizer implements the Second approach from [1, Sec 4.1.2].
It uses the Metropolis-Hastings algorithm to optimize the space; see Wikipedia. This algorithm used in this context is a special case of the Simulated Annealing the reader may be more familiar with; see Wikipedia.
Short description
In every iteration , an algorithm considers a permutation, say, . Then a random transposition is drawn uniformly , and the value of is computed.
- If a new value is bigger than the previous one (i.e., ), then we set .
- If a new value is smaller (), then we will choose with probability . Otherwise, we set with complementary probability .
The final value is the best ever computed.
Notes
This algorithm was tested in multiple settings and turned out to be a good optimizer for this problem. Especially given it does not need any hyperparameters tuned.
The only parameter it depends on is max_iter, which
determines the number of steps described above. One should choose this
number rationally. When set too small, there is a missed opportunity to
find a much better permutation. When set too big, there is a lost time
and computational power that does not lead to growth. We recommend
plotting the convergence plot with a logarithmic OX scale:
plot(g_map, type = "best", logarithmic_x = TRUE), then
decide if the line has flattened already. Keep in mind that the OY scale
is also logarithmic. For example, a marginal change on the OY scale
could mean
times the change in A Posteriori.
For more information about continuing the optimization, see the Continuing the optimization section below.
This algorithm has been analyzed extensively by statisticians. Thanks
to the ergodic theorem, the frequency of visits to a given state
converges almost surely to the probability of that state. This is the
approach explained in [1,
Sec.4.1.2] and shown in [1, Sec. 5.2]. One can
obtain estimates of posterior probabilities by setting
return_probabilities = TRUE.
Example
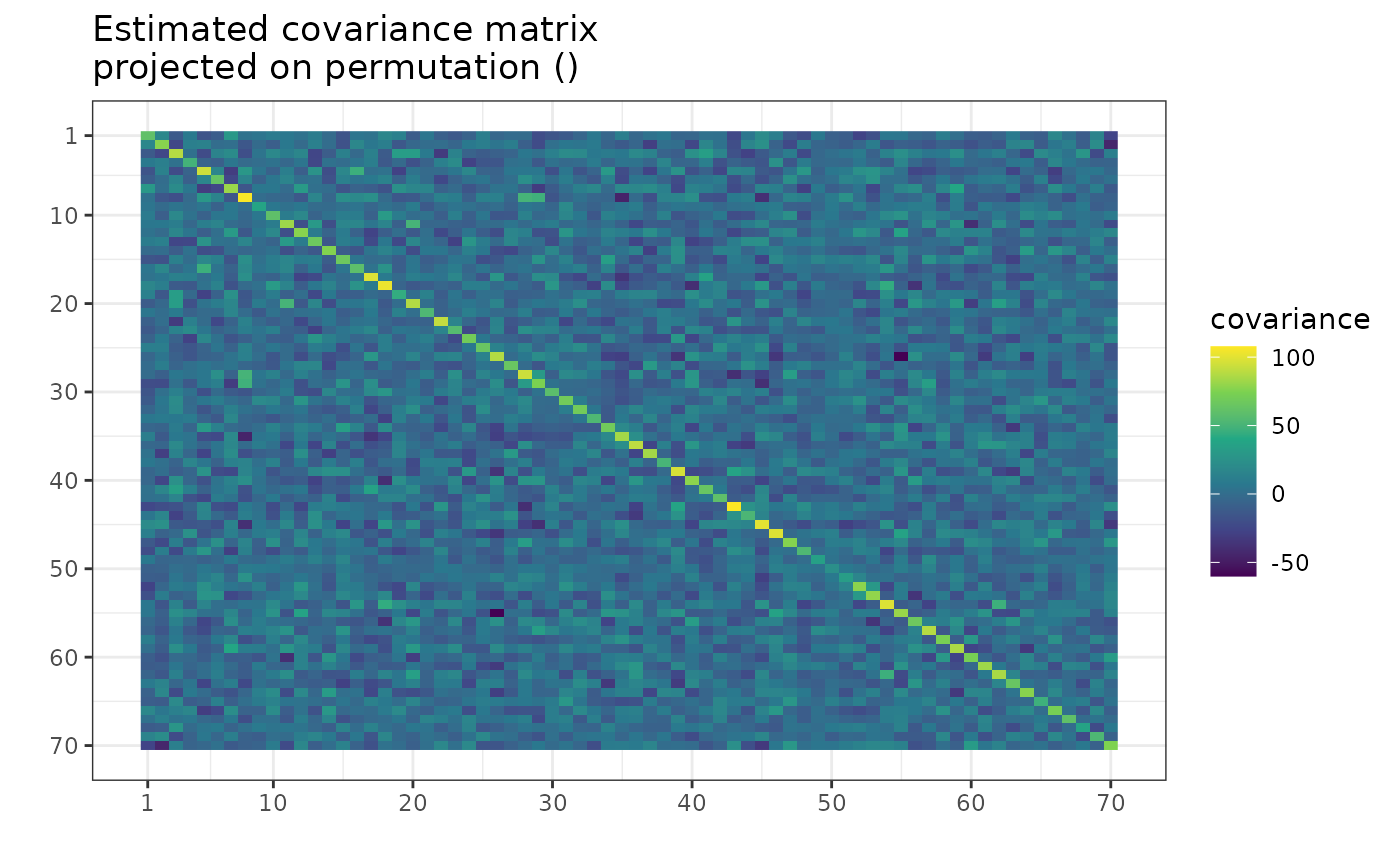
Let’s say we have the data Z from the unknown
process:
dim(Z)
#> [1] 50 70
number_of_observations <- nrow(Z) # 50
perm_size <- ncol(Z) # 70
S <- cov(Z) # Assume we have to estimate the mean
g <- gips(S, number_of_observations)
suppressMessages( # message from ggplot2
plot(g, type = "heatmap") +
ggplot2::scale_x_continuous(breaks = c(1, 10, 20, 30, 40, 50, 60, 70)) +
ggplot2::scale_y_reverse(breaks = c(1, 10, 20, 30, 40, 50, 60, 70))
)
g_map <- find_MAP(g, max_iter = 150, optimizer = "Metropolis_Hastings")
#> ===============================================================================
g_map
#> The permutation (1,34,64,27,60,40,26,14,13,53,62,22,11,41,21,7,29,48,24,30,46,57,38,16,23,18,20,10,59,35,32,69,54,17,2,58,31,8,49,66,52,15,47,37,45,50,51,3,63,43,68,33,19,44,55,6,9,4,36,56,25,39,61,70,42,5,67):
#> - was found after 150 posteriori calculations;
#> - is 5.34e+648 times more likely than the () permutation.After just 150 iterations, the found permutation is unimaginably more
likely than the $_0 = $ () permutation.
plot(g_map, type = "best", logarithmic_x = TRUE)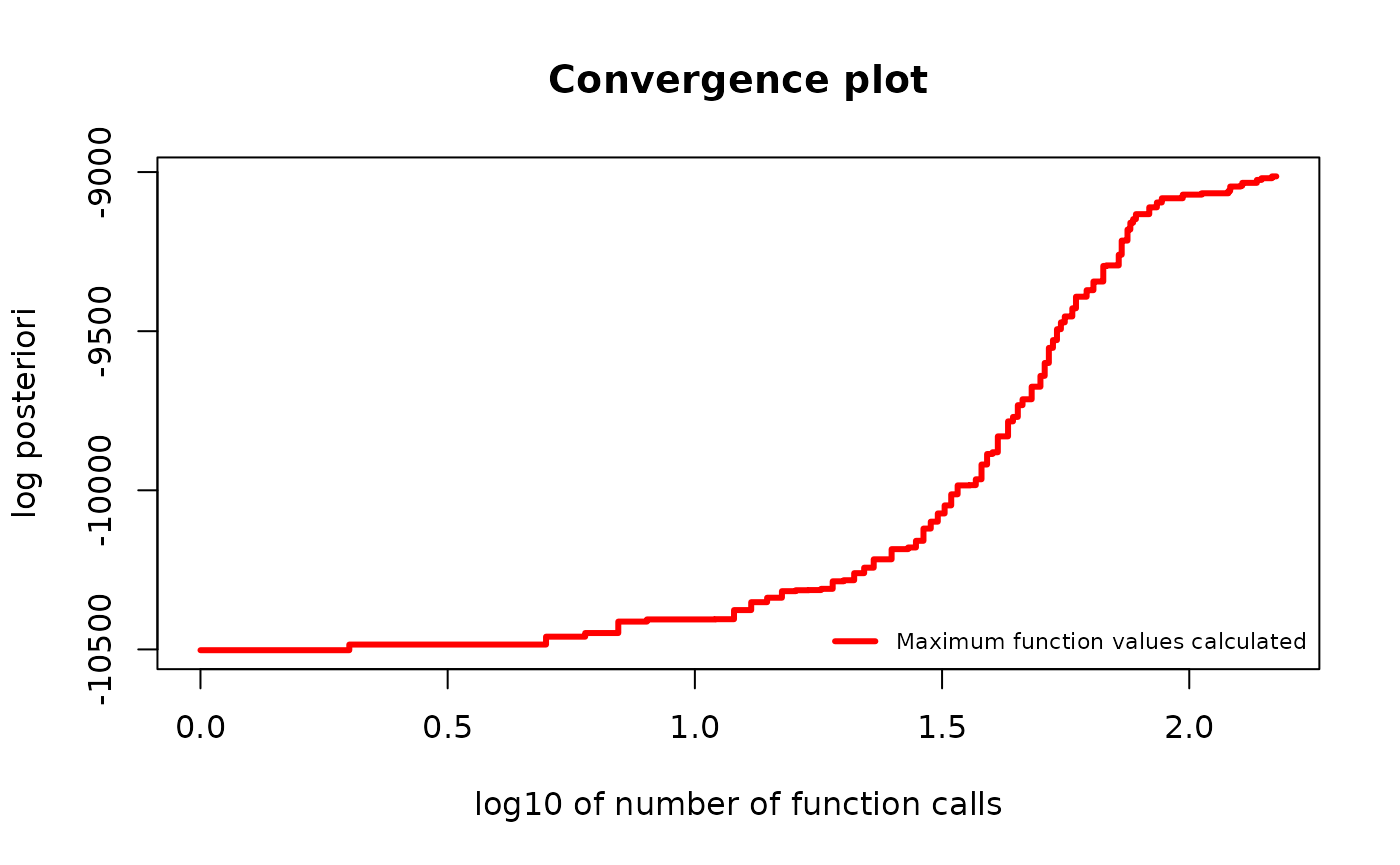
Hill climbing
It uses the Hill climbing algorithm to optimize the space; see Wikipedia.
It is performing the local optimization iteratively.
Short description
In every iteration , an algorithm considers a permutation; call it . Then, all the values of are computed for every possible transposition . Then the next will be the one with the biggest value:
Where:
The algorithm ends when all neighbors are less likely, or the
max_iter is achieved. In the first case, the algorithm will
finish at a local maximum, but there is no guarantee that this is also
the global maximum.
Example
Let’s say we have the data Z from the unknown
process:
dim(Z)
#> [1] 20 25
number_of_observations <- nrow(Z) # 20
perm_size <- ncol(Z) # 25
S <- cov(Z) # Assume we have to estimate the mean
g <- gips(S, number_of_observations)
plot(g, type = "heatmap")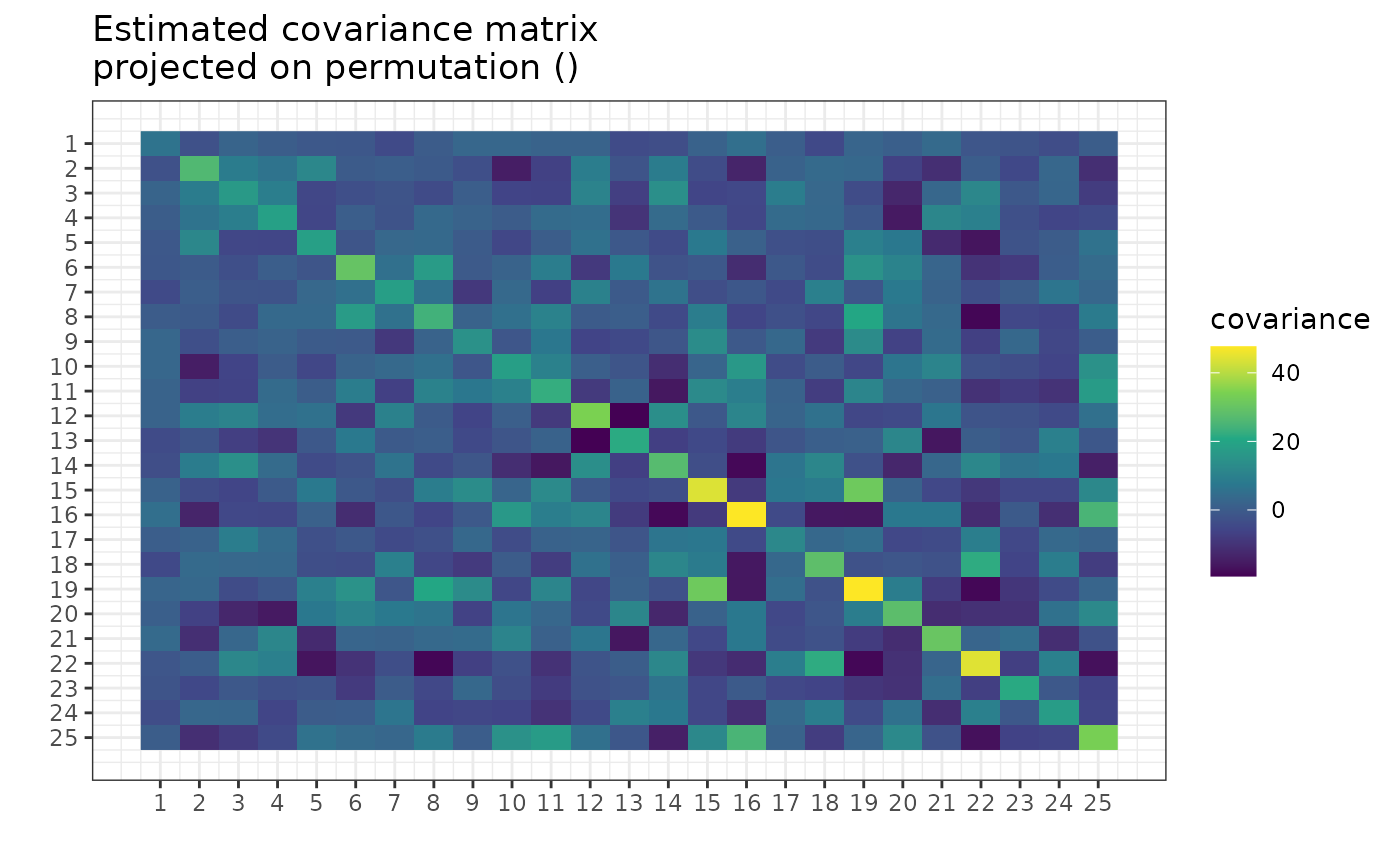
g_map <- find_MAP(g, max_iter = 2, optimizer = "hill_climbing")
#> ================================================================================
#> Warning: Hill Climbing algorithm did not converge in 2 iterations!
#> ℹ We recommend to run the `find_MAP(optimizer = 'continue')` on the acquired output.
#> Warning: The found permutation has n0 = 24, which is bigger than the number_of_observations = 20.
#> ℹ The covariance matrix invariant under the found permutation does not have the likelihood properly defined.
#> ℹ For a more in-depth explanation, see the 'Project Matrix - Equation (6)' section in the `vignette('Theory', package = 'gips')` or its pkgdown page: https://przechoj.github.io/gips/articles/Theory.html.
g_map
#> The permutation (11,15)(13,24):
#> - was found after 601 posteriori calculations;
#> - is 2.132e+8 times more likely than the () permutation.
plot(g_map, type = "best")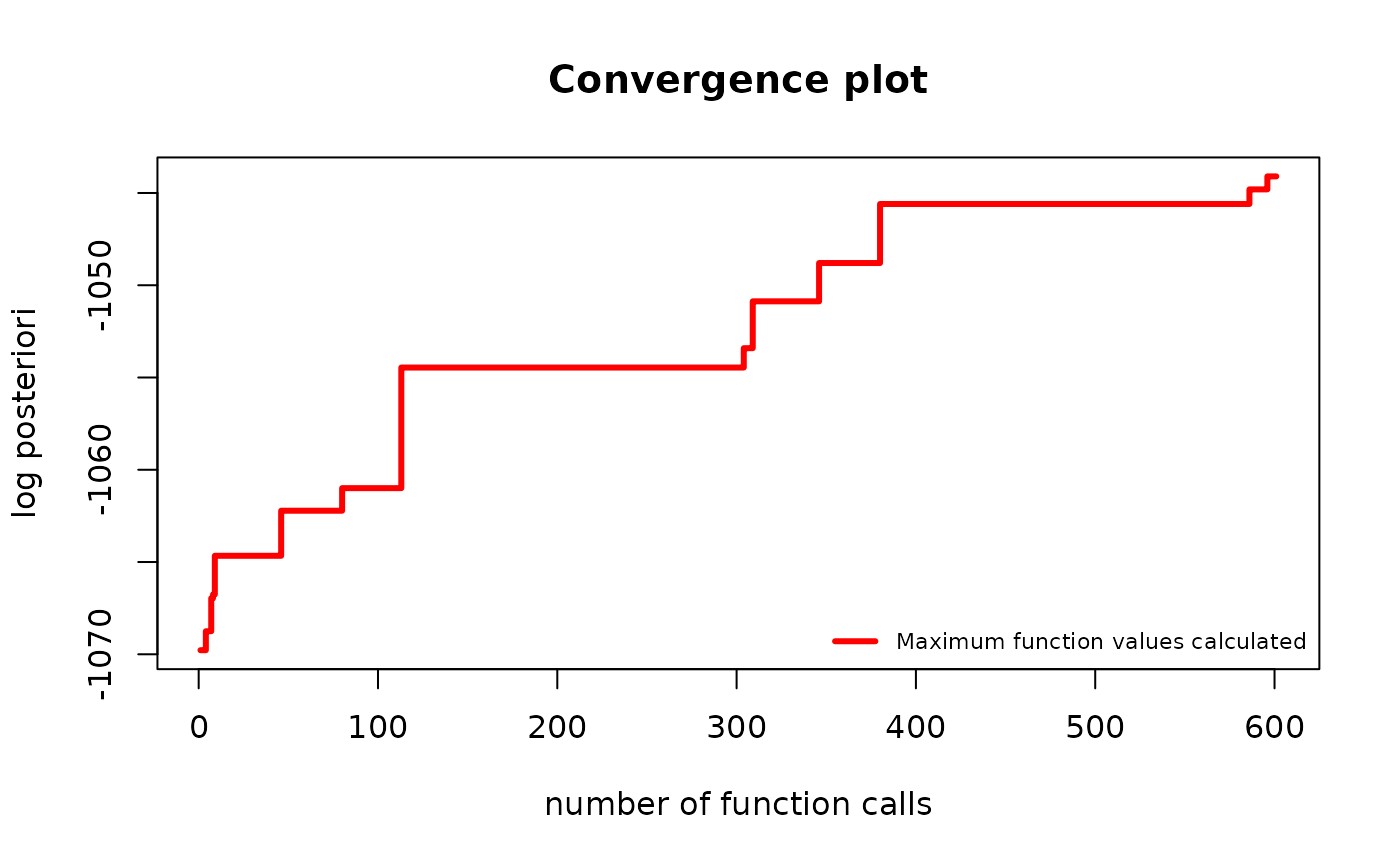
The above warnings are expected.
Continuing the optimization
When max_iter is reached during Metropolis-Hastings or
hill climbing, the optimization stops and returns the result. Users are
encouraged to plot the result and determine if it has converged. If
necessary, users can continue the optimization, as shown below.
g <- gips(S, number_of_observations)
g_map <- find_MAP(g, max_iter = 50, optimizer = "Metropolis_Hastings")
#> ==============================================================================
plot(g_map, type = "best")
The algorithm was still significantly improving the permutation. It is reasonable to continue it:
g_map2 <- find_MAP(g_map, max_iter = 100, optimizer = "continue")
#> ===============================================================================
plot(g_map2, type = "best")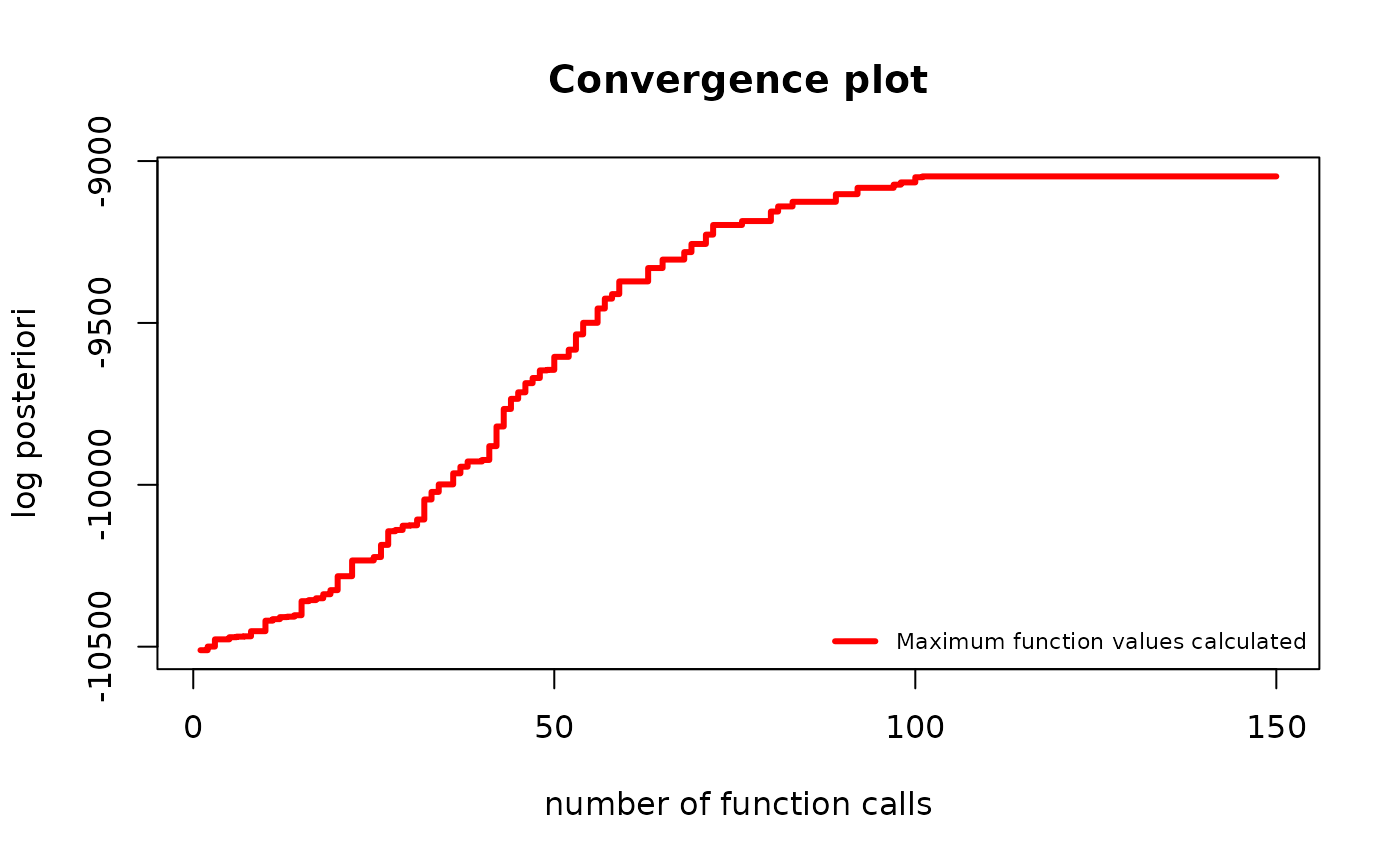
The improvement has slowed down significantly. It is fair to stop the algorithm here. Keep in mind the y scale is logarithmic. The visually “small” improvement between 100 and 150 iterations was huge, times the posteriori.
Additional parameters
The find_MAP() function has two additional parameters:
show_progress_bar and save_all_perms, which
can be set to TRUE or FALSE.
When show_progress_bar = TRUE, gips will
print “=” characters on the console during optimization. Remember that
when the user sets the return_probabilities = TRUE, a
second progress bar will indicate the calculation of the probabilities
after optimization.
The save_all_perms = TRUE will save all visited
permutations in the outputted object, which significantly increases the
required RAM. For instance, with
and max_iter = 150000, we needed 400 MB to store it,
whereas save_all_perms = FALSE only required 2 MB. However,
save_all_perms = TRUE is necessary for
return_probabilities = TRUE or more complex path
analysis.
Discussion
We encourage everyone to discuss on available and potential new optimizers on ISSUE#21. One can also see why some optimizers were implemented but not yet added to gips there.
References
[1] Piotr Graczyk, Hideyuki Ishi, Bartosz Kołodziejek, Hélène Massam. “Model selection in the space of Gaussian models invariant by symmetry.” The Annals of Statistics, 50(3) 1747-1774 June 2022. arXiv link; DOI: 10.1214/22-AOS2174
[2] “Learning permutation symmetries with gips in R” by
gips developers Adam Chojecki, Paweł Morgen, and Bartosz
Kołodziejek, Journal of Statistical
Software.