Use one of the optimization algorithms to find the permutation that maximizes A Posteriori probability based on observed data. Not all optimization algorithms will always find the MAP, but they try to find a significant value. More information can be found in the "Possible algorithms to use as optimizers" section below.
Usage
find_MAP(
g,
max_iter = NA,
optimizer = NA,
show_progress_bar = TRUE,
save_all_perms = FALSE,
return_probabilities = FALSE
)Arguments
- g
Object of a
gipsclass.- max_iter
The number of iterations for an algorithm to perform. At least 2. For
optimizer = "BF", it is not used; foroptimizer = "MH", it has to be finite; foroptimizer = "HC", it can be infinite.- optimizer
The optimizer for the search of the maximum posteriori:
"BF"(the default for unoptimizedgwithperm size <= 10) - Brute Force;"MH"(the default for unoptimizedgwithperm size > 10) - Metropolis-Hastings;"HC"- Hill Climbing;"continue"(the default for optimizedg) - The same as thegwas optimized by (see Examples).
See the Possible algorithms to use as optimizers section below for more details.
- show_progress_bar
A boolean. Indicate whether or not to show the progress bar:
When
max_iteris infinite,show_progress_barhas to beFALSE;When
return_probabilities = TRUE, then shows an additional progress bar for the time when the probabilities are calculated.
- save_all_perms
A boolean.
TRUEindicates saving a list of all permutations visited during optimization. This can be useful sometimes but needs a lot more RAM.- return_probabilities
A boolean.
TRUEcan only be provided whensave_all_perms = TRUE. For:optimizer = "MH"- use Metropolis-Hastings results to estimate posterior probabilities;optimizer = "BF"- use brute force results to calculate exact posterior probabilities.
These additional calculations are costly, so a second and third progress bars are shown (when
show_progress_bar = TRUE).To examine probabilities after optimization, call
get_probabilities_from_gips().
Details
find_MAP() can produce a warning when:
the optimizer "hill_climbing" gets to the end of its
max_iterwithout converging.the optimizer will find the permutation with smaller
n0thannumber_of_observations(for more information on what it means, see \(C_\sigma\) andn0section in thevignette("Theory", package = "gips")or in its pkgdown page).
Possible algorithms to use as optimizers
For an in-depth explanation, see in the
vignette("Optimizers", package = "gips") or in its
pkgdown page.
For every algorithm, there are some aliases available.
"brute_force","BF","full"- use the Brute Force algorithm that checks the whole permutation space of a given size. This algorithm will find the actual Maximum A Posteriori Estimation, but it is very computationally expensive for bigger spaces. We recommend Brute Force only forp <= 10. For the time the Brute Force takes on our machines, see in thevignette("Optimizers", package = "gips")or in its pkgdown page."Metropolis_Hastings","MH"- use the Metropolis-Hastings algorithm; see Wikipedia. The algorithm will draw a random transposition in every iteration and consider changing the current state (permutation). When themax_iteris reached, the algorithm will return the best permutation calculated as the MAP Estimator. This implements the Second approach from references, section 4.1.2. This algorithm used in this context is a special case of the Simulated Annealing the user may be more familiar with; see Wikipedia."hill_climbing","HC"- use the hill climbing algorithm; see Wikipedia. The algorithm will check all transpositions in every iteration and go to the one with the biggest A Posteriori value. The optimization ends when all neighbors will have a smaller A Posteriori value. If themax_iteris reached before the end, then the warning is shown, and it is recommended to continue the optimization on the output of thefind_MAP()withoptimizer = "continue"; see examples. Remember thatp*(p-1)/2transpositions will be checked in every iteration. For biggerp, this may be costly.
Multi-sample
If g was created with gips(list(S1, S2, ...), c(n1, n2, ...)),
the same optimizers search for one permutation shared by all groups.
The optimized criterion is the combined log-posterior, i.e. the sum of
per-group log-posteriors. The default optimizer is still chosen from the
common matrix size p, and warnings about MLE existence use min(n_g).
References
Piotr Graczyk, Hideyuki Ishi, Bartosz Kołodziejek, Hélène Massam. "Model selection in the space of Gaussian models invariant by symmetry." The Annals of Statistics, 50(3) 1747-1774 June 2022. arXiv link; doi:10.1214/22-AOS2174
See also
gips()- The constructor of agipsclass. Thegipsobject is used as thegparameter offind_MAP().plot.gips()- Practical plotting function for visualizing the optimization process.summary.gips()- Summarize the output of optimization.AIC.gips(),BIC.gips()- Get the Information Criterion of the found model.get_probabilities_from_gips()- Whenfind_MAP(return_probabilities = TRUE)was called, probabilities can be extracted with this function.log_posteriori_of_gips()- The function that the optimizers offind_MAP()tries to find the argmax of.forget_perms()- When thegipsobject was optimized withfind_MAP(save_all_perms = TRUE), it will be of considerable size in RAM.forget_perms()can make such an object lighter in memory by forgetting the permutations it visited.vignette("Optimizers", package = "gips")or its pkgdown page - A place to learn more about the available optimizers.vignette("Theory", package = "gips")or its pkgdown page - A place to learn more about the math behind thegipspackage.
Examples
require("MASS") # for mvrnorm()
perm_size <- 5
mu <- runif(perm_size, -10, 10) # Assume we don't know the mean
sigma_matrix <- matrix(
data = c(
1.0, 0.8, 0.6, 0.6, 0.8,
0.8, 1.0, 0.8, 0.6, 0.6,
0.6, 0.8, 1.0, 0.8, 0.6,
0.6, 0.6, 0.8, 1.0, 0.8,
0.8, 0.6, 0.6, 0.8, 1.0
),
nrow = perm_size, byrow = TRUE
) # sigma_matrix is a matrix invariant under permutation (1,2,3,4,5)
number_of_observations <- 13
Z <- MASS::mvrnorm(number_of_observations, mu = mu, Sigma = sigma_matrix)
S <- cov(Z) # Assume we have to estimate the mean
g <- gips(S, number_of_observations)
g_map <- find_MAP(g, max_iter = 5, show_progress_bar = FALSE, optimizer = "Metropolis_Hastings")
g_map
#> The permutation (1,2):
#> - was found after 5 posteriori calculations;
#> - is 2.337 times more likely than the () permutation.
g_map2 <- find_MAP(g_map, max_iter = 5, show_progress_bar = FALSE, optimizer = "continue")
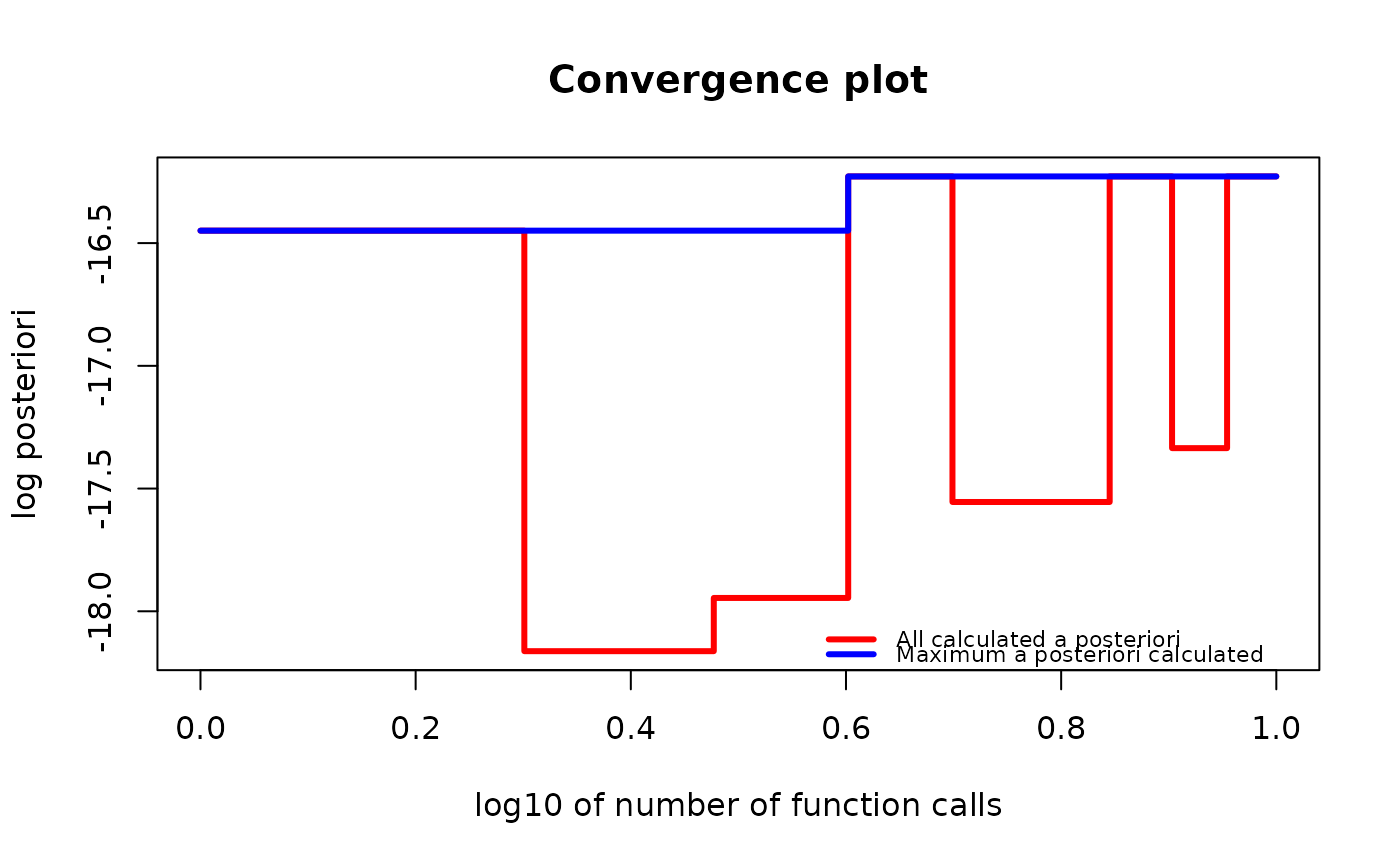
plot(g_map2, type = "both", logarithmic_x = TRUE)
 g_map_BF <- find_MAP(g, show_progress_bar = FALSE, optimizer = "brute_force")
summary(g_map_BF)
#> The optimized `gips` object.
#>
#> Permutation:
#> (1,2,3,4,5)
#>
#> Log_posteriori:
#> -15.1521
#>
#> Times more likely than starting permutation:
#> 414.386
#>
#> The p-value of Likelihood-Ratio test:
#> 0.4883
#>
#> The number of observations:
#> 13
#>
#> The mean in the `S` matrix was estimated.
#> Therefore, one degree of freedom was lost.
#> There are 12 degrees of freedom left.
#>
#> n0 = number of cycles in a permutation + 1 (as the mean was estimated):
#> 2
#>
#> The MLE estimator based on the found permutation does exist,
#> since the number of observations (13) is bigger than n0 (2).
#>
#> The number of free parameters in the covariance matrix:
#> 3
#>
#> BIC:
#> 129.0236
#>
#> AIC:
#> 127.3288
#>
#> --------------------------------------------------------------------------------
#> Optimization algorithm:
#> brute_force
#>
#> The number of log_posteriori calls:
#> 67
#>
#> Optimization time:
#> 0.04516196 secs
g_map_BF <- find_MAP(g, show_progress_bar = FALSE, optimizer = "brute_force")
summary(g_map_BF)
#> The optimized `gips` object.
#>
#> Permutation:
#> (1,2,3,4,5)
#>
#> Log_posteriori:
#> -15.1521
#>
#> Times more likely than starting permutation:
#> 414.386
#>
#> The p-value of Likelihood-Ratio test:
#> 0.4883
#>
#> The number of observations:
#> 13
#>
#> The mean in the `S` matrix was estimated.
#> Therefore, one degree of freedom was lost.
#> There are 12 degrees of freedom left.
#>
#> n0 = number of cycles in a permutation + 1 (as the mean was estimated):
#> 2
#>
#> The MLE estimator based on the found permutation does exist,
#> since the number of observations (13) is bigger than n0 (2).
#>
#> The number of free parameters in the covariance matrix:
#> 3
#>
#> BIC:
#> 129.0236
#>
#> AIC:
#> 127.3288
#>
#> --------------------------------------------------------------------------------
#> Optimization algorithm:
#> brute_force
#>
#> The number of log_posteriori calls:
#> 67
#>
#> Optimization time:
#> 0.04516196 secs